ピリオディックモーションエラーを補正するよう
プログラムを補正しました。
前回、ホームポジションを検知するSWを
付けましたので、ピリオディックモーションエラー
のズレかたは毎回同じと想定し、
また、ズレ方はサインカーブの形と想定して、
モーターの駆動速度を、時間経過とともに、
遅らせたり、早めたりと、微調整する
補正値を設定する事で対応しました。
前回、ホームポジションを検知するSWを
付けましたので、ピリオディックモーションエラー
のズレかたは毎回同じと想定し、
また、ズレ方はサインカーブの形と想定して、
モーターの駆動速度を、時間経過とともに、
遅らせたり、早めたりと、微調整する
補正値を設定する事で対応しました。
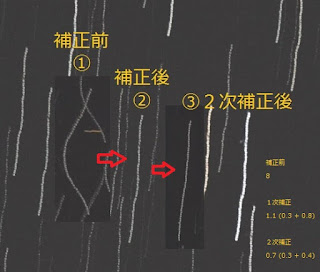
補正結果はこちら。

(200mm APSC機で撮影時)
大きくカーブしている輝線が補正前、
直線に近い輝線が補正後です。
まだまだエラーが出ていますが、
2,3分の露出でも、タイミングによって
200mmでもブレずに撮影できそうです。
また、広角レンズであれば十分だと思います。
また、広角レンズであれば十分だと思います。
もう少し補正できないかチャレンジしてみます。
<追記>
後日、もう少し補正(2次補正)をかけてみました。
毎回、このような精度になるか分かりませんが、
最初の10分の1以下のエラー値にまで
改善出来ました。
大体、プラスマイナス127秒角
⇒ プラスマイナス11秒角くらいでしょうか。
試し撮りの結果はこんな感じです。
180秒間の追尾 ( APS-C機 200mm )
大体、点像に写っています。

300秒間の追尾 ( APS-C機 200mm )
拡大すると、星像が横に2倍位に膨れています。

<追記>
後日、もう少し補正(2次補正)をかけてみました。
毎回、このような精度になるか分かりませんが、
最初の10分の1以下のエラー値にまで
改善出来ました。
大体、プラスマイナス127秒角
⇒ プラスマイナス11秒角くらいでしょうか。

試し撮りの結果はこんな感じです。
大体、点像に写っています。

300秒間の追尾 ( APS-C機 200mm )
拡大すると、星像が横に2倍位に膨れています。

0 件のコメント:
コメントを投稿